Table of contents
No headersSee Laura's spreadsheet with log of Jupiter and Saturn scans for 3mm and 1.3mm
Current best offset fit:
estimate for:
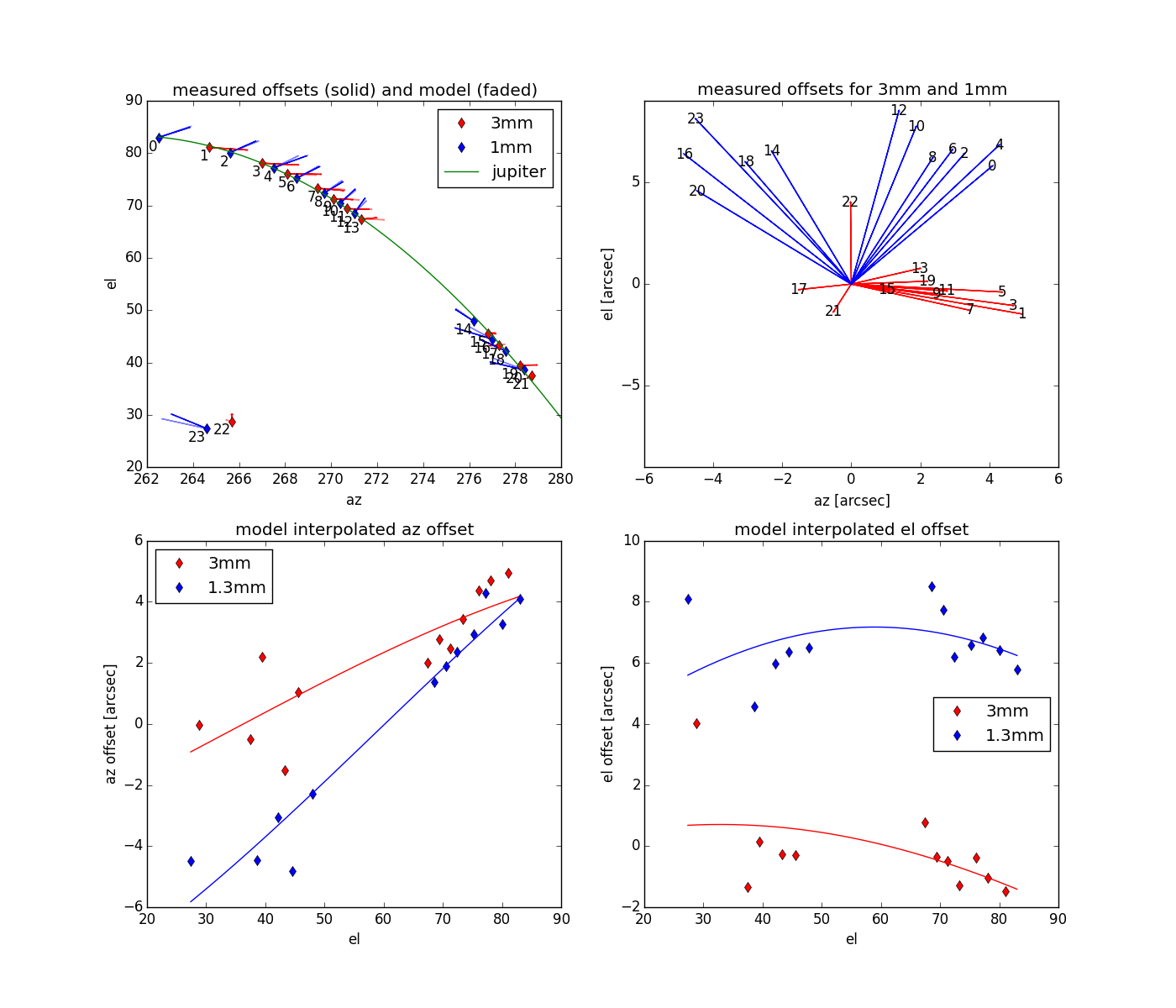
1.3mm measured offset minus 3mm measured offset, where measured offset is the offset as returned by various pointing codes.
az_offset = [0.11] + -5.94 * cos(-elev) - 0.56 * sin(-elev)
el_offset = [1.69] + -5.94 * sin(-elev) + 0.56 * cos(-elev)
The fixed terms [0.11], [1.69] arcsec may represent systematics from pointing on Jupiter substructure, with different code on 3mm and 1.3mm, or components which do not fit a purely rotational model well. They are not applied to the pointing correction we are using right now during VLBI scans.
method:
- smooth model fit for systematic fixed offset + rotating component for both 3mm and 1.3mm offset measurements
- model is used to interpolate 3mm and 1.3mm offsets in order to get 1.3-3mm differential offsets at measured locations. the effect of the model interpolation does not seem drastically different than a linear fit though all the data. there is too much scatter between measurements for simple linear interpolation, averaging adjacent measurements, etc.
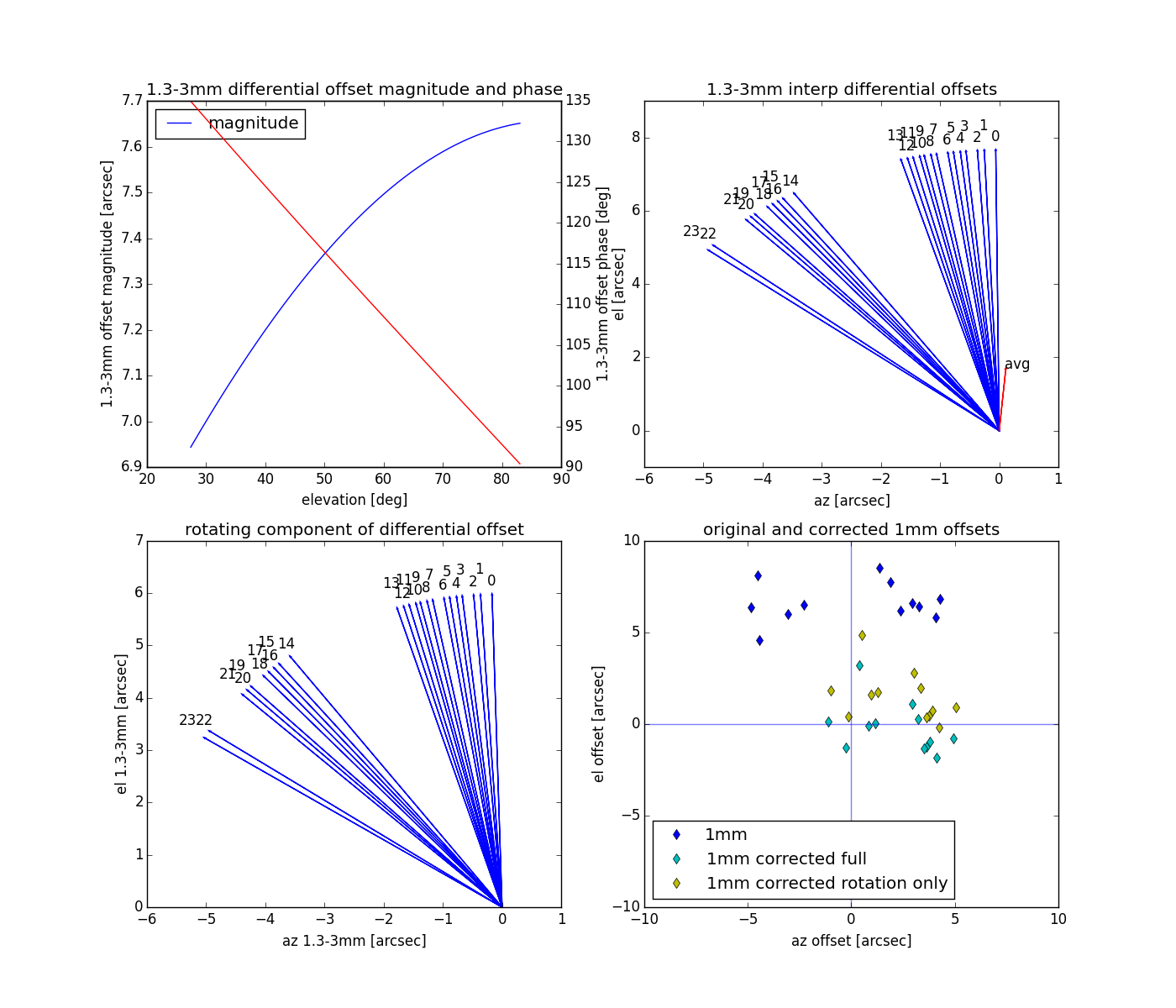
- the estimated differential offset at each measurement location is also fit to a model with fixed offset + rotating component. the fixed component is more of a cross-check -- if the systematic pointing offsets on Jupiter are the same for 1.3mm and 3mm, and we have trended the 3mm and 1mm offsets correctly, this fixed component should be small.
- for pointing corrections, we only apply the rotational component of the differential offsets -- this is the conservative (smaller) correction from the 3mm determined reference location.
notes:
- I did not determine the -elev rotation of offsets from first principles.. but I tried both rotations positive and negative, and -elev fits the data better by a very large degree.
- The model (fixed + rotating offset) does not take into account possibly complicated effects from the original 3mm pointing model. We begin by fitting the 3mm and 1.3mm offsets separately, so the model is just one way to interpolate between noisy measurements in some physically consistent way. It's not necessarily going to be correct or better than some other kind of interpolation (averaging, linear, etc) but it does give a well behaved differential offset. In particular the model does not seem to capture pointing errors near zenith but it is difficult to see from the limited data what the actual trend should be (linear fit for 3mm offset looks like it would be fine too).